トランジスタ技術2019年1月号
特集 物理大実験!宇宙ロケットの製作
[協力]インターステラテクノロジズ

■超音速マッハ4!高エネルギ塊を計算軌道にコンピュータ制御
人工知能/ロボット/自動運転など,人はこれまで,科学的好奇心とビジネスを目的に,人間ライクなマシン造りを研究模索してきました.そしてロケットは,究極の無人自動制御マシンといえます.
ロケットは,さまざまなセンサと出力デバイスを実装し,重力に打ち勝つパワーとベクトルを制御することで,どんなに強い風が吹いてもその姿勢をくずすことなく,宇宙の目標点に向かって舞い上がっていきます.開発には,ディジタル信号処理,FPGA,センサ,軌道計算,ソフトウェア無線,モータ制御,エンジン,機体など,多くのテクノロジの粋が集められます.しかし大きな危険を伴うため,小さな失敗が許されることはありません.物理力学への深い理解と,信頼性の高い設計技術,詳細なシミュレーションと実証実験の繰り返しが欠かせません.
特集では,国内唯一の民間ロケット開発ベンチャ「インターステラテクノロジズ社」の技術陣が,無人化が進むIoTマシンの1つの究極の形「ロケット」のテクノロジを詳解します.付録DVD-ROMには,ロケット開発を疑似体験できるシミュレーション・ツールやデータを収録します.
[目次]
プロローグ1 今日は宇宙ロケット打ち上げの日
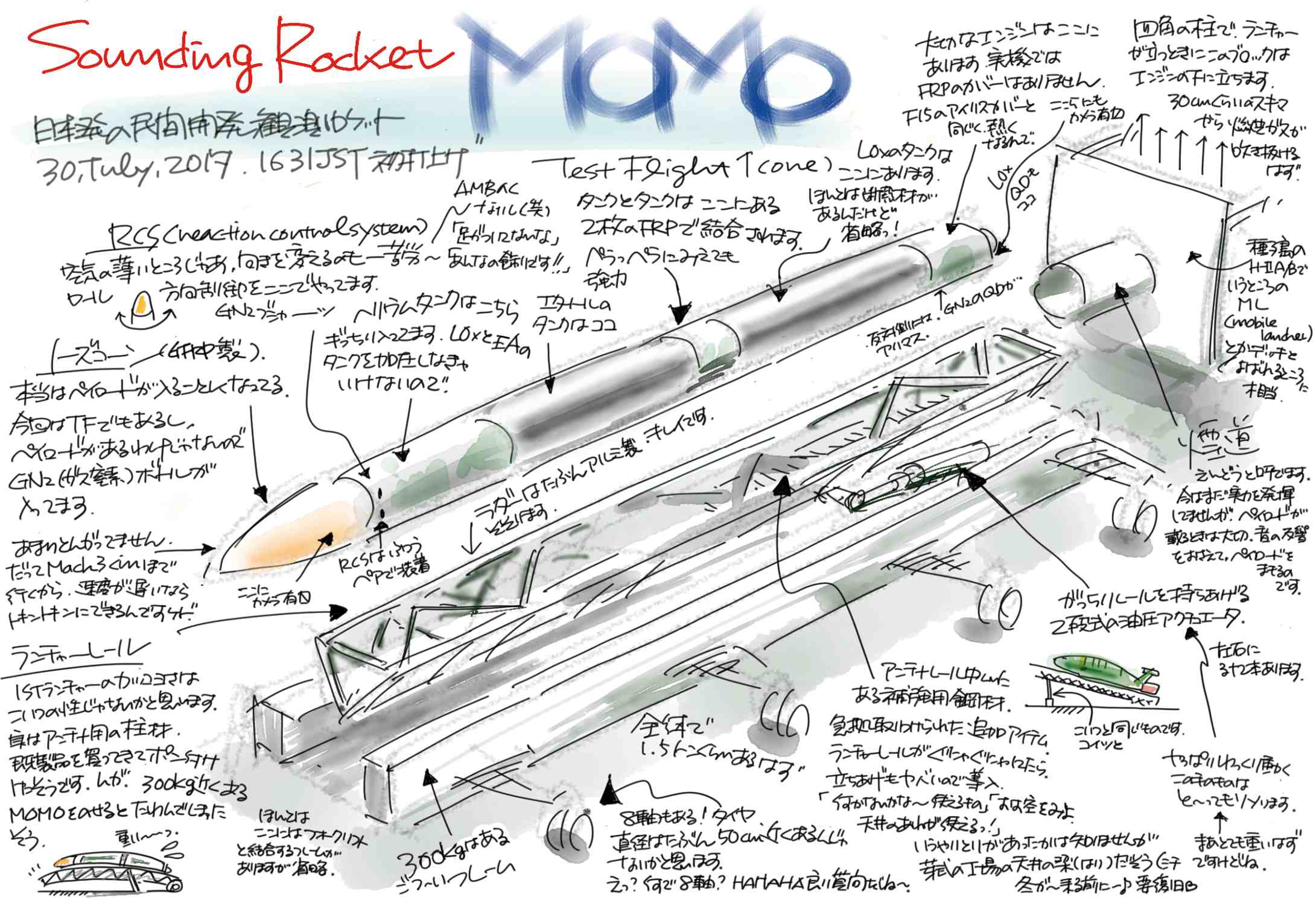
プロローグ2 小型宇宙ロケットMOMO大解剖
Appendix1 小型宇宙ロケットMOMO基本スペック
第1章 日本発!低価格ミニ・ロケット誕生
Appendix2 ロケット大好き「インターステラテクノロジズ」の取り組み
第2章 宇宙ロケット開発の第1歩
Appendix3 ロケット開発の重い責任
Appendix4 実証あるのみ!低コストと高信頼性の両立
Appendix5 宇宙への第一歩!全国のロケット・イベント
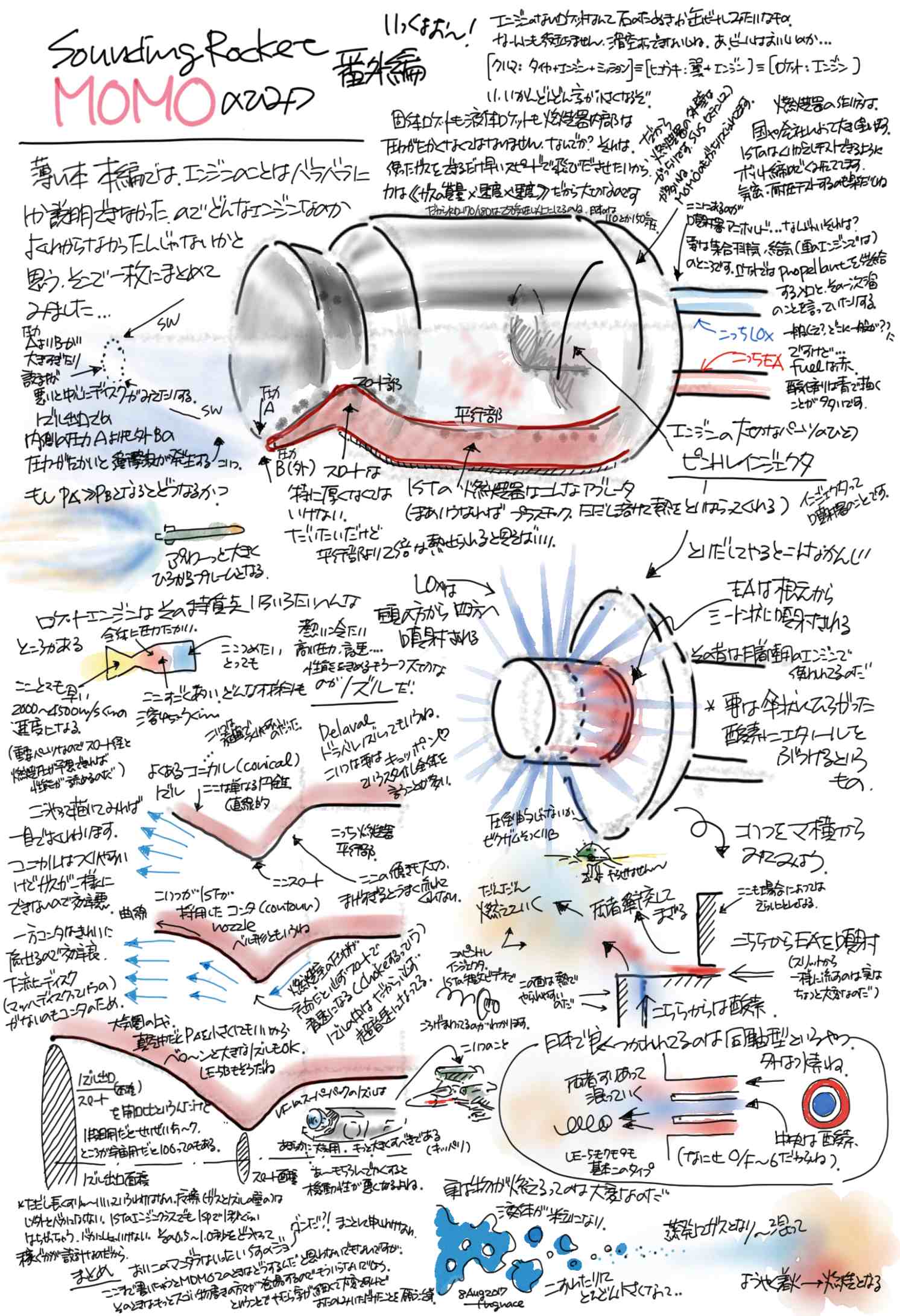
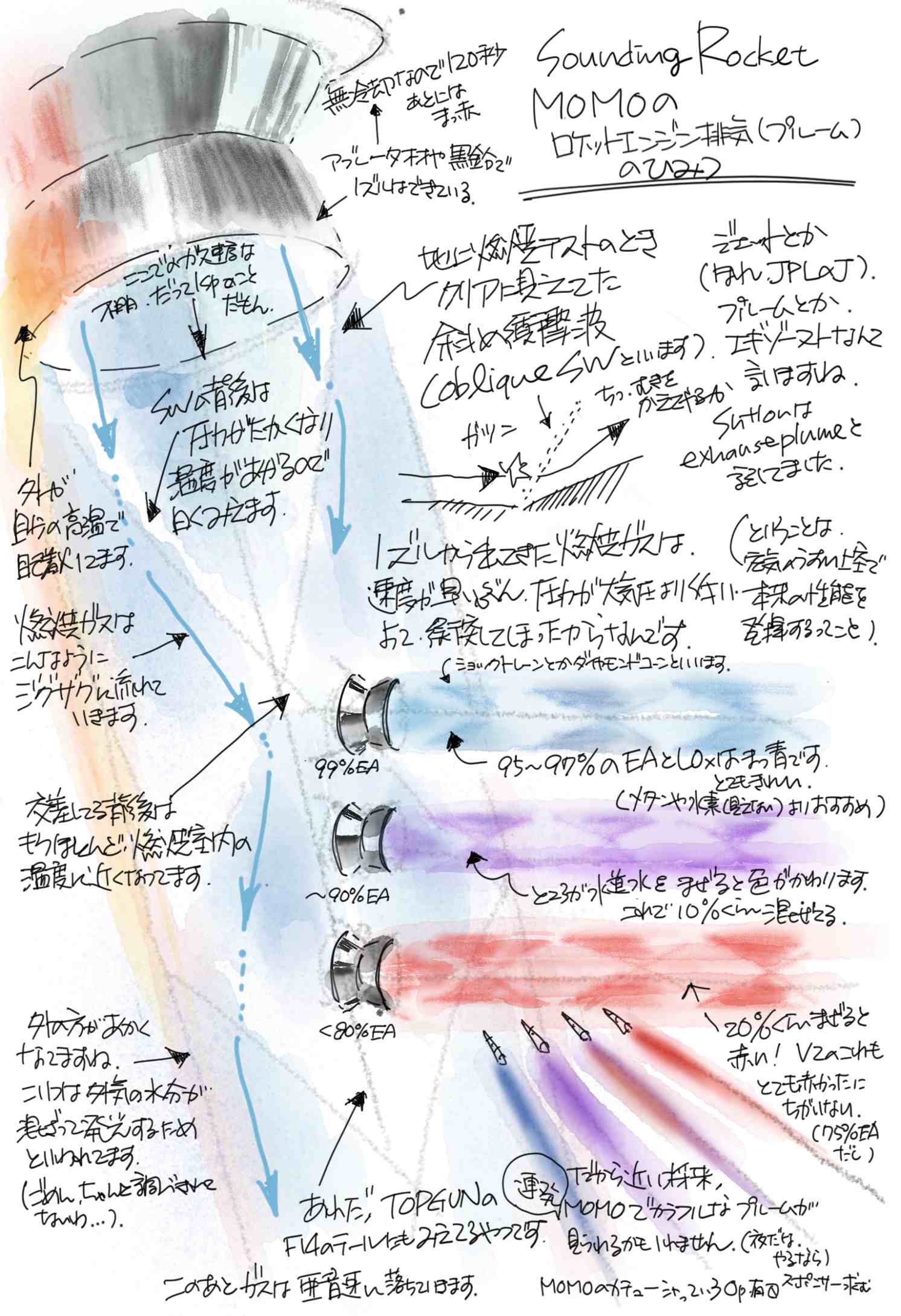
第3章 宇宙ロケット開発物語① ロケット・エンジン
第4章 宇宙ロケット開発物語② 軌道計算の技術
Appendix6 軌道計算シミュレータ OpenTsiolkovskyの使い方
第5章 宇宙ロケット開発物語③ データ通信と電力供給ネットワーク
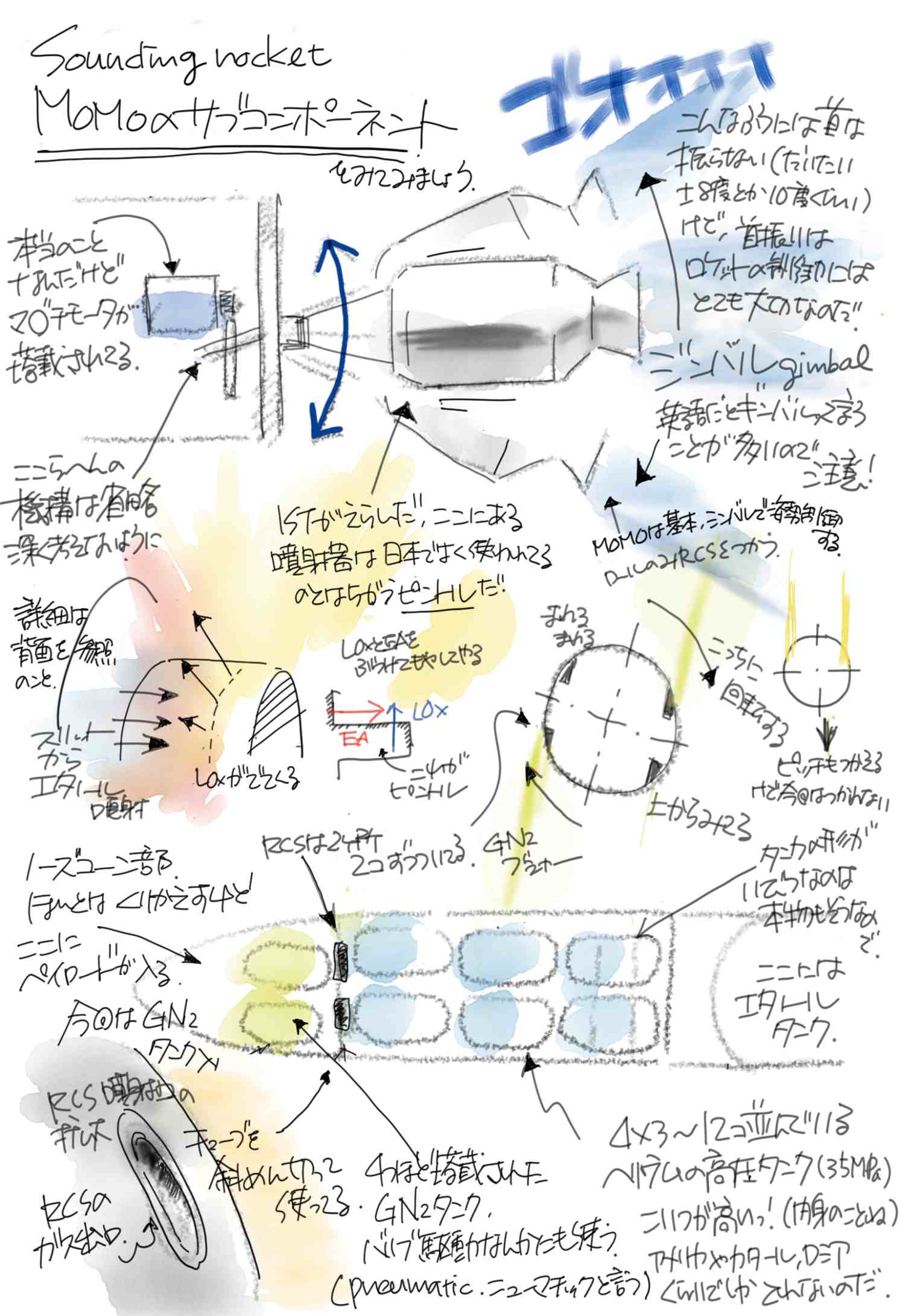
第6章 宇宙ロケット開発物語④ コンピュータ/センサ/アクチュエータ
第7章 宇宙ロケット開発物語⑤ 姿勢制御シミュレーション
第8章 宇宙ロケット開発物語⑥ ジャイロによる高精度姿勢計測
Appendix7 MOMOにも搭載!注目のカルマン・フィルタ
[付録DVD-ROMのコンテンツ]
・飛行シミュレータ OpenTsiolkovsky
・姿勢制御MATLABシミュレーション
・ジャイロ・データ解析サンプル
・CANインターフェース・サンプル・ソフト
・姿勢制御シミュレーション・ムービ
・MOMOロケット開発の裏舞台ムービ
 ■特集の目次とサンプル記事
■特集の目次とサンプル記事
サンプル記事をご覧いただけます.
https://toragi.cqpub.co.jp/tabid/898/Default.aspx
■初公開!本誌編集部 現地取材ビデオ(2018年6月17日)
打ち上げに失敗した2018年6月30日の約2週間前 MOMO2号機の地上実験のようすです
IST社によるエレクトロニクス・セミナ開催
■宇宙ロケット・アビオニクス開発体験ワークショップ
【会場】東京・巣鴨 CQ出版社セミナ・ルーム [定員]約10名
●宇宙ロケット搭載アビオニクスの製作[講師による実験実演付き]
https://seminar.cqpub.co.jp/sch/all
【講師】森岡 澄夫(インターステラテクノロジズ)
http://www.istellartech.com/


IST社技術者と語る!懇親会付きオフ会開催(予定)
【開催日】2019年2月10日 14:00-17:00
【会場】東京・巣鴨 CQ出版社 [定員]30名
【会費】2,000円(懇親会代)
https://atnd.org/events/102641
宇宙ロケットMOMOイラスト集 [著]thgrace