


編集部
2020年9月号はROS入門!
●自律移動ロボットにチャレンジ!
配膳ロボットや,人と一緒に製造ラインで働くロボットなど,いろいろなロボットが少しずつ,実用化されてきています.海外では,新型コロナ・ウイルス対策もあり,配達ロボットを実験している地域もあります.
実際にロボットを作るとなると,ハードウェアの準備にコストが掛かる上に,大規模なソフトウェアも開発することになり大変です.最初のうちはうまくいっても,ちょっとしたバグで全損,なんてこともあるかもしれません.
●ロボット開発もシミュレーションで動作を確認してから実験へ
回路を作るとき,はんだごてを握る前に,回路シミュレータで動作を確認したり,定数にあたりをつけてから試作に入ることが多いのではないでしょうか.
ロボットでも同様です.むしろ,ソフトウェアが大規模で,実験に失敗したら大変な自律移動ロボットや大型ロボットほど,シミュレーションで十分なチェックをしてから,実物を使った実験に入ります.
自律移動ロボットも,いきなり車体などのハードウェアを用意するのではなく,シミュレーション実験から始める手があります.このとき必要なのは,インターネットに接続できるパソコン1台と,やる気だけです.そしてロボットのシミュレーション環境を整備するときにお勧めなのが,Robot Operating System,ROSです.

●世界中の研究者やエンジニアと一緒に開発
世界中のエンジニアがお互いに助け合いながらロボット用のソフトウェアを開発するのに使っている環境がROSです.ROSは,LinuxなどのOSの上で動くソフトウェアで,センサやアクチュエータなどのデバイス・ドライバや,プログラム同士を繋ぐ役割を果たすと同時に,動作時のログを取ったり,動作のようすを可視化したりするツールを持っています.
ROSという共通の環境で開発することで,開発者はお互いにプログラムの流用,取得データや動作の検証ができて,開発をスピードアップできるのです.
●ROSのインストール方法からシミュレーション内で動くロボットの作り方まで
特集では,ROSを動かすOSとしてUbuntuのインストールから始めます.ROSのインストール,定番ツールのインストール,ROSのしくみを解説し,シミュレーション内で既存のロボットを動かしてみます.
その後,屋内で動かす2輪ロボットを題材に,シミュレーション用のモデルを作ってみます.同じロボットにLiDAR(レーザを使ったレーダ)を乗せて,部屋のようすを把握させてみます.
あとは,ソフトウェアを頑張って作り込んでいけば,自律移動ロボットができるはず…?まずは,それほどコストが掛からないところから手をつけてみるのはどうでしょうか.千里の道も一歩からです.
読者プレゼントはラズパイ搭載の屋内用ロボット
●ラズベリー・パイで自律移動に挑戦できる2輪ロボット
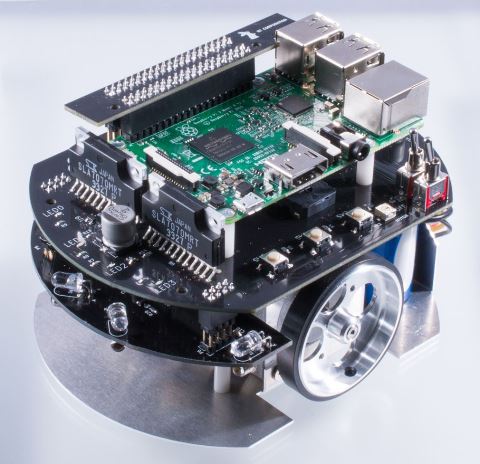
シミュレーション環境内に自作するロボットのモデルとして,LiDARを載せた自律移動ロボットの例として,Raspberry Pi Mouse V3を使っています.差動2輪でソフトウェアから制御しやすく,屋内で動かすには手頃なサイズです.今回の読者プレゼントはこのRaspberry Pi Mouse V3のラズベリー・パイ3付きフルキットです.
応募は読者アンケートからお願いします.
https://toragi.cqpub.co.jp/tabid/112/Default.aspx
●Raspberry Pi Mouse V3を用いたロボット講義動画コンテンツを公開中!
以下のリンクから,講義動画の概要やプレビューなどがご覧になれます.
https://rt-net.jp/r2r-raspimouse
特集関連リンク
●ROS
https://www.ros.org/
・ROS wiki
http://wiki.ros.org
・ROS wiki 日本語版
http://wiki.ros.org/ja
・ROS Discource 情報交換
https://discourse.ros.org/
・ROS Discource 日本のROSユーザグループ
https://discourse.ros.org/c/local/japan/32
・ROS Answers
https://answers.ros.org/questions/
・ROS導入ノートパソコン比較調査 - 東京オープンソースロボティクス協会
https://opensource-robotics.tokyo.jp/?p=4495
・UbuntuへROS Melodicをインストールする手順
http://wiki.ros.org/melodic/Installation/Ubuntu
・特集第3章 ROSの通信機能のしくみ で使っているサンプル・ソース
https://github.com/takasehideki/toragi_ros_tutorial
●Ubuntu 18.04.4
https://releases.ubuntu.com/18.04.4/
・Rufus 起動可能なUSBメモリ作成ツール(Windows用)
https://rufus.ie
●双腕&ステレオ・ビジョン研究用ロボット NEXTAGE OPEN
https://www.kawadarobot.co.jp/nextage/#nextage-research-go
・ROSパッケージ
https://github.com/tork-a/rtmros_nextage
●ROSを活用した自律走行
・ROSのslam_gmappingパッケージとnavigationパッケージを活用した自律走行@つくばチャレンジ2014
・ROS,Cartographer,Autowareを活用した自律走行@つくばチャレンジ2018
・原 祥尭:「CartographerとAutowareを用いた自律走行」,第27回 ROS Japan勉強会,2018
https://www.slideshare.net/hara-y/cartographer-autoware-rosjp
・原 祥尭:「Cartographerを用いた3D SLAM」,第6回3D勉強会@関東,2019.
https://www.slideshare.net/hara-y/cartographer-3dcvtech-2019
●つくばチャレンジ
https://tsukubachallenge.jp/2020/
・つくばチャレンジ2020 参加者向け説明会資料
https://tsukubachallenge.connpass.com/event/183516/presentation/
・バーチャルつくばチャレンジ(VTC)
https://github.com/furo-org/VTC/
・VTC on Unity
vtc_world_unity(環境):https://github.com/Field-Robotics-Japan/vtc_world_unity
sensors_unity(センサ):https://github.com/Field-Robotics-Japan/sensors_unity
unit04_unity(ロボット):https://github.com/Field-Robotics-Japan/unit04_unity
vtc_unity(統合):https://github.com/Field-Robotics-Japan/vtc_unity
・原 祥尭, 冨沢 哲雄, 伊達 央, 黒田 洋司, 坪内 孝司:「つくばチャレンジ2019技術調査報告」,つくばチャレンジ2019シンポジウム,2020.
https://www.slideshare.net/hara-y/tsukuba-challenge-2019-survey
